Infant incubators are mainly used in the clinical care of premature infants, low birth weight infants, critically ill children or neoplastic dysplastic newborns. It plays an important role in pediatric medical care and is an indispensable medical device in hospitals [1][2]. Due to the particularity of such infants, infant incubators have high requirements for control accuracy, stability and safety. Most of the baby incubators on the market today use the traditional PID algorithm. The conventional PID algorithm is the most widely used basic control law in process control, and has the advantages of high stability and good robustness. However, it is difficult to achieve good results for time-varying nonlinear systems. In this paper, the fuzzy PID algorithm is used to control the temperature of the baby incubator, and the dynamic and static characteristics of the system are further improved.
1 Design of baby incubator temperature control systemThe system uses the single-chip technology to implement servo control on the incubator temperature, and automatically enters the box temperature control state when the power is turned on. The temperature control monitor is the core component of the instrument and has functions such as temperature setting and real-time temperature monitoring. The block diagram of the system is shown in Figure 1:

The temperature of the air in the baby incubator is delayed. From the detection that the temperature inside the box is less than the set value until the heater starts to heat up, the temperature inside the box will continue to decrease for a period of time. When the heating stops, the temperature will not stop rising immediately. It only stops after a period of rise. Therefore, the temperature inside the baby incubator has been fluctuating up and down. The fuzzy adaptive PID control can solve such problems better. The differential control component can improve the dynamic characteristics of the system, and the integral control component can reduce the system static difference.
2 system hardware structureThe hardware structure control chip of this system selects 16-bit low-power MSP430 series single-chip microcomputer [3][4], adopts DS18B20 temperature sensor to pass the temperature measurement value of baby incubator to single-chip I/O port through single line, and traditional thermistor In comparison, it can directly read the measured temperature, and can realize 9 to 12 digits of digital value reading according to actual requirements; 9 and 12 digits can be completed in 93. 75 ms and 750 ms respectively. . After the temperature measurement value is subjected to the fuzzy adaptive PID operation inside the MCU, the control signal is output to the optocoupler clutch to isolate the input signal and the output signal, reduce interference, and achieve signal amplification. The amplified signal is used to control the thyristor to control the operation of the heater wire. The temperature value is calibrated by the keyboard and the liquid crystal display, the temperature value is displayed periodically, and the upper and lower limit alarm values ​​are set. The specific circuit is shown in Figure 2.
The software design mainly adopts adaptive fuzzy PID control method [5][6][7][8]. Fuzzy control is a new type of computer intelligent control based on fuzzy cybernetics, fuzzy linguistic variables and fuzzy logic reasoning. Combined with the traditional PID algorithm, the fuzzy adaptive control theory is formed, and the fuzzy parameters are used to realize the automatic adjustment of PID parameters.
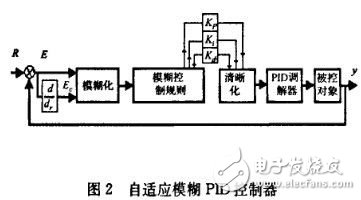
The adaptive fuzzy PID controller takes the error E and the error change Ec as inputs, and can meet the requirements of the self-tuning of the PID parameters at different time offsets E and deviation change rates Ec. Using the fuzzy control rules to modify the PID parameters online, it constitutes an adaptive fuzzy PID controller, as shown in Figure 3.
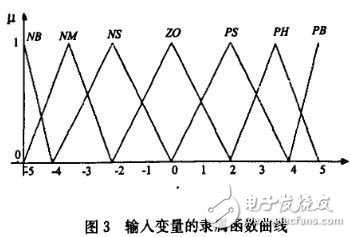
Set the fuzzy subset of the input variable E and Ec language values ​​to {negative, negative, negative, zero, positive, positive, positive}, and abbreviated as {NB, NM, NS, ZO, PS, PM, PB}, the error E and the error rate of change Ec are quantized into the region of ( - 5, 5), and the membership function curve of the input variable is shown in Fig. 4. Similarly, the fuzzy subsets of the designed outputs KP, KI, and KD are {ZO, PS, PM, PB}, and are quantized into regions (0, 3), (0, 0.2), (0, 0.8), respectively. .
Geekvape Vape,Geek Bar Disposable Vape,Geek Bar Vape Kit,Geek Bar Vape Pod
TSVAPE Wholesale/OEM/ODM , https://www.tsecigarette.com