This paper introduces the development of a wheeled car inertial navigation system, which can realize the transmission of data collected by the PC terminal and the handheld terminal and the data collected by the trolley through wifi. Set up the system shown in Figure 1 below. TI's floating-point DSPTMS320F28335 chip is used as the main digital signal processor to collect and process the signals of each MEMS inertial sensor. The processing result is transmitted to the PC terminal through WIFI; the PC terminal is responsible for displaying the positioning result. And the map display, and send control commands to the trolley drive system, while receiving odometer information fed back by the drive system.
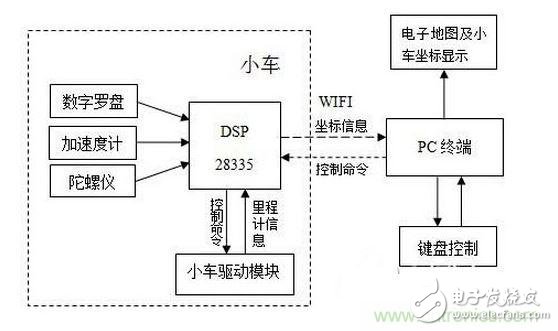
Figure 1 Overall architecture
Hardware design, mainly divided into core board and driver board. The core board includes DSP minimum system, JTAG download port design, system power supply circuit and MEMS sensor, WIFI module and so on. The main design of the driver board is the drive module of the DC motor.<br> <br> power circuit schematic circuit design
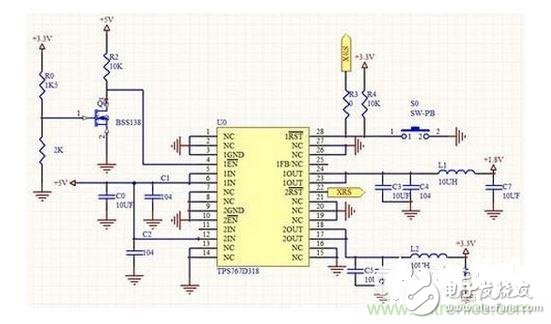
Figure 2 DSP power supply design
The TMS320F28335 requires different voltages during operation: the core voltage (1.9 V) and the I/O supply voltage (3.3 V), which are sensitive to the power supply, so the power supply is implemented using two output power devices, the TPS767D318, as shown in Figure 2. At the same time, according to the simulation experiment and the actual welding circuit test, it is better to use some protective capacitors with a capacitance value of not less than 10uf, and the chip capacitor cannot be used, otherwise the operation is unstable.In the power supply design, considering that the TPS767D318 chip can generate a reset signal, there is no additional reset circuit for the DSP on the core board.
JTAG download port circuit design
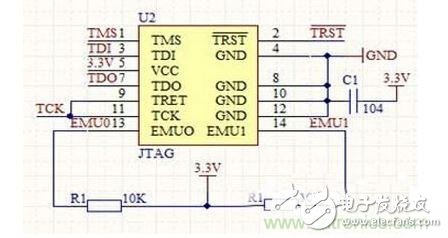
Figure 3 JTAG circuit design
Figure 3 shows the JTAG circuit. Select the 14-pin emulation interface according to the emulator's communication pin. Also note that the EMU0 and EMU1 signals must be connected to the power supply through pull-up resistors, where the pull-up resistor is 10kΩ.Car drive board design
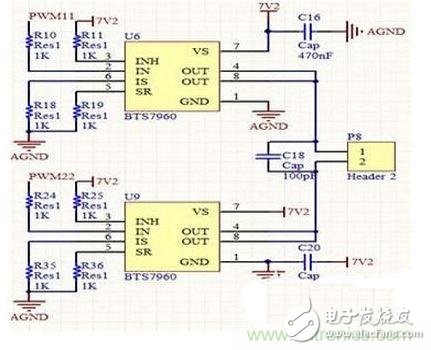
Figure 4 drive module circuit design
In this device, we use the BTS7960 as the DC motor driver chip. The BTS7960 is an integrated high-current half-bridge driver that contains an NMOS, a PMOS, and a half-bridge gate drive. It has an internal impedance of 17mΩ at IOUT = 9 A, VS = 13.5V, and Tj = 25 °C. . The device uses two DC large motors, as shown in Figure 4, which is a circuit diagram that drives the front and rear steering of a single motor.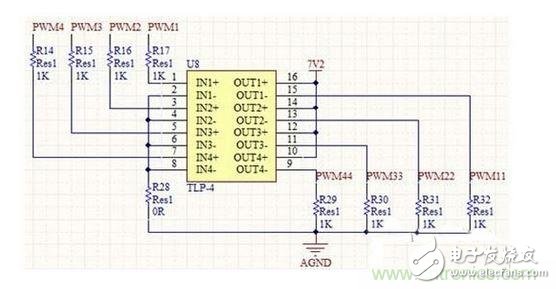
Figure 5 TLP521 isolation circuit
In the motor drive here, you need to pay attention to a detail, that is, the motor may generate a reverse electromotive force during the rotation process, so that the current is too large, causing the microcontroller to reset or even burn the chip. Therefore, in the design process, you can consider adding optocoupler isolation or diode at the PWM input to the motor drive interface. As shown in Figure 5, the driver board selects the optocoupler design isolation circuit of tlp521-4, which reduces the voltage interference, reduces the design of the circuit, and also pulls the I/O level of the four PWMs from 3.3. To 5V.Conclusion herein, editor <br> <br> wheel truck designed indoor inertial navigation device, analyzes the specific method of each module of the software design. The experimental results show that the design can monitor the position information of the mobile robot in real time and can effectively control it. At the same time, its low-cost, high-precision and easy-to-operate features will be further applied to professional fields such as patrol robots and rescue robots. It will attract many investors from home and abroad to invest in it and carry out further research and development and application. A vast majority of innovation and entrepreneurial prospects, application prospects and market prospects.
Qunsuo is a professional manufacturer of barcode scanner. We provide 1D barcode scanner and QR code scanner, help customers from various industries. All of our barcode scanner support connecting with Android IOS via bluetooth. Furthermore, Our barcode scanner also support connecting with PC via 2.4G wireless module. Qunsuo provide portable scanner, finger barcode scanner and Handheld Barcode Scanner. And our QS-S03 is equipped with Zebra scanner engine. If any interests, please feel free to send inquiry to us for more information.

2D Barcode Scanner,Free Barcode Scanner,Finger Barcode Scanner,Barcode Scanner Android
Shenzhen Qunsuo Technology Co., Ltd , https://www.qsprinter.com