With the rapid development of automotive technology and electronic technology, Hyundai Motor has adopted automotive control technology to improve vehicle power, economy, safety, comfort, and reduce exhaust pollution. Automotive control systems, including car anti-husking Dead Brake System (ABS), Automotive Drive Anti-Slip System (ASR), Automotive Electronic Stability Program (ESP), Electronic Induction Brake Control System (SBC), Electronic Brake Force Distribution (EBD), Auxiliary Brake System (BAS) , airbag (SRS) and automotive radar anti-collision systems; electronic control of automotive transmission systems, including electronically controlled automatic transmission (EAT) and continuously variable transmission (CVT); electronically controlled automatic air conditioning (A / C); cruise control system ( CCS); electronically controlled suspension (ECS); electronically controlled power steering system (EPS); central locking and anti-theft alarm system; vehicle network technology; other electronic control devices, including automotive electronic instruments, car navigation systems, car audio systems, The composition and control principle of the vehicle driving recorder and the tire pressure monitoring system, as well as the fault diagnosis and maintenance of the vehicle electronic control system.
This article refers to the address: http://
Let us introduce in detail the automotive automatic control technology in the vehicle control technology.
In order to make the vehicle control system meet the requirements of vehicle speed control, the selection of the control scheme is very important after the overall scheme of the real-time control system of the single-chip microcomputer is determined. At present, the control schemes for the vehicle cruise control mainly include PID control, fuzzy control, iterative learning control, and self-control. Adaptation control, etc., they all have their own characteristics.
1.PID control
PID control, that is, proportional-integral-differential control, realizes cruise control of the vehicle's constant parameters according to the deviation between the actual vehicle speed and the set vehicle speed.
During the driving process, the driver sets a vehicle speed to the vehicle control system, and the actual vehicle speed measured by the vehicle speed sensor is also input to the controller, generating a deviation between the actual vehicle speed and the set vehicle speed (set to Δv), the ratio of the controller. The part outputs a corresponding control amount according to the magnitude of the deviation to control the opening degree of the throttle valve, so that the vehicle speed rapidly approaches the set vehicle speed. Considering that the deviation always exists, the integral part of the controller accumulates the deviation and increases the control amount to eliminate the deviation, so that the vehicle speed remains constant, and the differential part plays a predictive role. When Δv>0, it means that the deviation is increasing, so that the control amount is increased in time to reduce Δv; when Δv<0, it means that the deviation is decreasing, then the control amount is reduced to avoid Δv approaching At zero hour, it develops in the opposite direction and causes oscillation.
The PID control has the advantages of simple structure and convenient parameter setting, and can obtain satisfactory control effects in many occasions. However, due to the complexity of the controlled object, nonlinear or time-varying processes, conventional PID control is applied. If the parameters are not properly adjusted, the system will oscillate continuously and the control effect is not satisfactory. The algorithm for PID will be described in detail in subsequent chapters.
2. Fuzzy control
Fuzzy control is a kind of control strategy that imitates the human brain in artificial control activities. It uses fuzzy mathematics to realize the artificial control strategy by computer. It is a new type of vehicle control technology developed in recent years. The driver's control of the car is essentially a process of fuzzy control. When the driver drives the car, he uses his own experience to determine the amount of change in the accelerator pedal based on the deviation between the target vehicle speed and the actual vehicle speed and the road surface condition, so that the vehicle approaches the target vehicle speed. The block diagram of the fuzzy control that mimics this process is shown in Figure 2. The input of the fuzzy controller for the car cruise control can generally select the deviation between the set vehicle speed and the actual vehicle speed and the rate of change of the deviation.
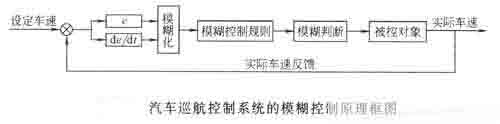
Fuzzy control does not depend on the accurate mathematical model of the system, so it is not sensitive to the parameter changes of the system. The shortcoming is that the acquisition of fuzzy control rules and the determination of the shape of fuzzy membership functions is a laborious task, and once the system is determined, its rules And the membership function is determined and cannot be adjusted with changes in the outside world and vehicle parameters.
3. Iterative learning control
Because there are serious nonlinearities and uncertainties in the cruising of the car, especially the cruise control parameters are uncertain at different speeds, and the real-time requirements of the motion carrier are high, so some people will learn the iterative learning algorithm. Applied to the automotive control system. The principle of car cruise control based on iterative learning technology is shown in Figure 3. By using the deviation between the actual vehicle speed and the set vehicle speed, a correction amount is obtained through multiple iterations, and the control amount of the controller output is further corrected, so that the actual vehicle speed is closer to the set vehicle speed.
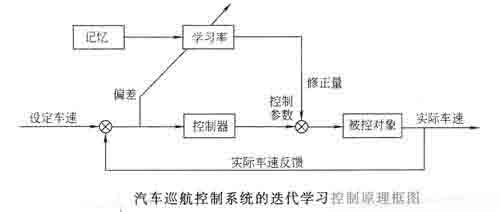
Iterative learning control can effectively control systems that have unknown parameters but are changing or invariant. Compared to other control technologies, iterative learning control is more adaptable and more real-time. However, its algorithm is complicated and computer programming is difficult.
4. Adaptive control
Since the automatic control system of the automobile is an intrinsic nonlinear system, and the vehicle is subjected to external disturbances such as road gradient and air resistance during driving, the control method based on the time-invariant system is difficult to achieve good results under various working conditions. The solution is to add an adaptive link, and its control method can be adjusted in real time with various factors to adapt to the complex and varied driving conditions.
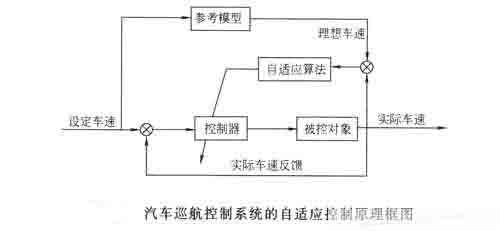
Adaptive control is designed for systems with certain uncertainties. The adaptive control method can automatically monitor the parameter changes of the system, so that the performance index of the system is kept optimal at all times. The current adaptive control for car cruise control is mainly model reference adaptive control. The principle of car cruise control based on adaptive control is shown in Figure 4. Set the vehicle speed to be added to the controller and the reference model at the same time. Since the ideal vehicle speed of the reference model is inconsistent with the actual vehicle speed, a deviation occurs. After the adaptive mechanism detects this deviation, after a certain operation, an appropriate adjustment signal is generated to change the controller parameters. Therefore, the actual vehicle speed quickly approaches the ideal vehicle speed. When the deviation tends to zero, the adaptive adjustment process stops and the control parameters are adjusted. When the car encounters ups and downs during driving or changes in speed due to wind, the system also adjusts the controller parameters as in the above process.
In view of the above characteristics of adaptive control, adaptive control is well suited for the control of a class of nonlinear systems such as automobiles. During the control process, the system can automatically adjust the control parameters to make the control effect better.
li ion 3s battery pack, 9v lowest, 12.6v highest. can be made to reguated stable 9v/10v/11v/12v.
3s battery, 3s lipo, 3s Lipo Battery , 9v Battery ,10.8V Battery Pack,11.1V Rechargeable Battery,12.6V Lithium Battery, 3S Lithium Ion Battery.
9v Battery
9v Battery,10.8V Battery Pack,11.1V Rechargeable Battery,12.6V Lithium Battery
Asarke Industry Co., Limited , https://www.asarke-industry.com